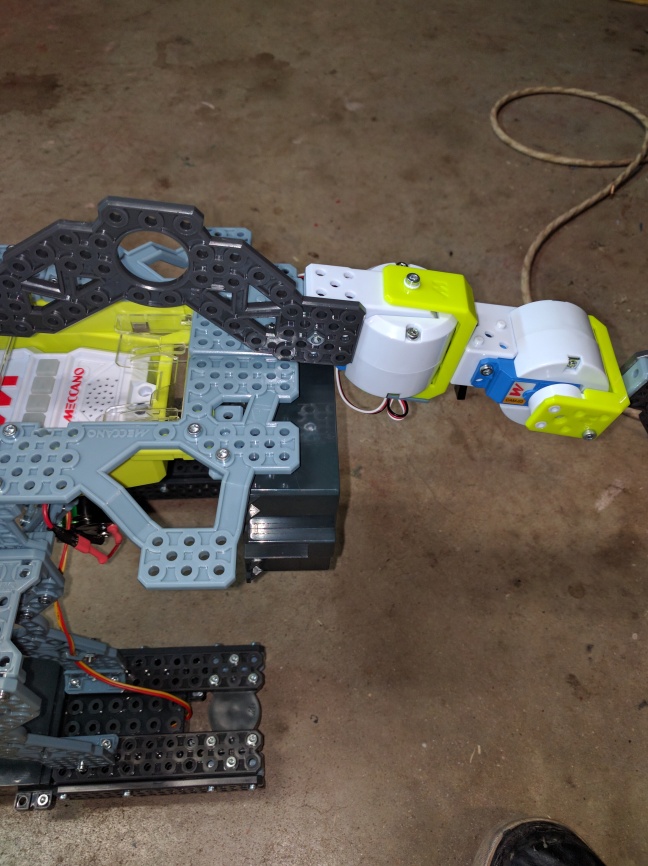
Overview tech of machine towards bottom. Reference for Zoomer 2 . This is NOT a hack. Repair and Review.
Casually walking through one of my favorite thrift stores minding all little things scattered about I happened to find a Zoomer Shadow partially buried under plush dolls and animals. Exterior was slightly tortured or loved. It was laying there in an awkward position of having its hip approximately 40 degrees from what would be inline. Legs, head, body, tail and wheels appeared intact. It didn’t have a charge so wouldn’t turn on. Checked the wheels to see if they would turn freely and they did. One wheel was a little less free moving then the other three. Indicative of usually nothing more than dirty. Could hear the gear train in each foot.
As with many things sold at this particular venue there was likely something wrong with it. That and it is unlikely a parent would donate a 100$ toy. Seldom anyway. These robots were at $200 plus not that long ago and still run about 100$ now.
The hip rotation was a fair guess of what went wrong. LiPo battery may have given out its lifespan was my first guess. Noted issue with charging and bad charging circuits for these bots. Average run time of 15-20 minutes wasn’t winning any awards with kids and less so on hour long recharge with a good USB A charger. It DID NOT come with a charger from manufacturer. ONLY the USB A to USB mini cable. Fortunately most people have cell phone charger with USB A laying about or at least a computer with open ports.
Given my insatiable curiosity and fixation on robotic tech it was a brief moment before it was on way home with me. That and few dollar price tag made it irresistible. Cuteness helped but not deciding factor.
To the work and test area for an evaluation. Not the workbench; the other work area. Kitchen table in use. Other other area. Plug in charger. Nothing. No power charging light. Give it a few minutes on charger. Still no glow. Thinking this is like gen 1 and need turn to off and let sit on charger for a bit. It isn’t and doesn’t need.. So unplug and move to where it can sit and charge but when plugged back in charge LED glows. Right about now getting the feeling something wrong but I have a charge light. Let it charge about 25 minutes and charge light goes off. Fully expected an hour or so run to charged. Battery last breaths? Don’t know yet.
Unplug Shadow from charge and LED matrix eyes cycle as if blinking to sleep eyes. Unlike the original Zoomer this would have translated to low battery but plugged in and on. It’s normal for Zoomer 2, Shadow and Bentley unplugged and on. Push head down to enter voice command mode. Barks a couple times and proceeds to back right up into kitchen sink at quick speed. Clunk. Good thing no water or meal mess in there. It’s still moving so pick up and put back on counter and it quickly activates hip motor making a horrible snapping noise and continues to do so whilst trying to turn hip. It apparently sensed the fall into sink and probably thinks still sitting upright on back leaned against side of sink or possibly doing one of its tricks or self righting. Second issue found. Something terrible wrong with hip motor and or mechanism.
 Now is time to bring out tools. Start with butt and work my way up the problem tree.
Now is time to bring out tools. Start with butt and work my way up the problem tree.
Four plus head(Phillips) screws and opens easily. Nothing standing out as broken. 3 potentiometers, a large-ish toy motor and gear box, two spring loaded leg mounts, switch plate with two buttons, and complement of wires. Check the waist motor pot for sweeping values and responds good.



Check the leg pots too. All good. Could see drive gear torque over mechanism used and appeared good. Taped and marked leg mounts so as not to have springs pop out. Slid rear legs out of their holders and removed switch plate and then waist gear motor. Pinion looked good. So continue up the path.



Mid section to waist is a separate module inset to chest with pivot point. Disassemble chest removing five more screws. One of which goes through center of mid-section pivot. Front legs similar mount to rear. Marked and taped up to prevent spring surprise and hopefully avoid alignment issues. Head is connected to spring and lever to mid section allowing for head left-right movement. Removed spring and carefully lifted top chest half.



Head also connected by in-line wire socket that go to eyes, speaker and neck switch from IR/Tilt chest PCB module.



Problem with waist readily apparent. Squished crimped wire syndrome on the three wire going to hip position sensor..



Nice that it was actually labeled waist on MCU board. I’m going to say was assembled that way from factory. Try as i might- getting wire to back into that position with mid section assembly with its two screws only, was not going to happen. It was in side ways which likely means two shell mid section was clamped on it. I tried several different ways. Several of those method would have required force that would otherwise break some other part.
 Of the course of natural events for me I didn’t have any that particular style connectors to roll out a new replacement assembly. Two, four and up to eight conductor sure. No threes. Go Fish. Cut out open section of wire and solder back together. Insulate with liquid ‘tape’. Partially re-assemble and test. All better now but waist is sticking. No more snapping over though. Apparently rear right leg that flew apart during disassembly was off on its hex sided mount also causing tricks and self righting not to work right.
Of the course of natural events for me I didn’t have any that particular style connectors to roll out a new replacement assembly. Two, four and up to eight conductor sure. No threes. Go Fish. Cut out open section of wire and solder back together. Insulate with liquid ‘tape’. Partially re-assemble and test. All better now but waist is sticking. No more snapping over though. Apparently rear right leg that flew apart during disassembly was off on its hex sided mount also causing tricks and self righting not to work right.






Back in and check waist gear box and motor. Last drive drive before pinion output was somewhat sheared. Nothing that couldn’t fix with sharp blade but put in on second gear position due to weakened condition and placed second gear in last drive position. Nice that they were all the same tooth and pitch counts. Re-assemble and test. That’s better. Right rear leg appearing to be sticky and not responding like others. Wheel/leg motor shell had ‘stuff’ in it. Wanted pictures of gear train anyhow. Good excuse.









Still issue with charging circuit. I could reassemble ass end fully and leave it be for now. Back into chest.




Watch microphone wire and re-tape to side or may catch on head swivel spring/lever. Remove spring and head connector again. Remove four screws holding motherboard in. Two hold a plastic shield. Infra Red detectors, head connector, and tilt switch are on a perpendicular daughter board soldered on. Remove connectors on board top side. Carefully removed motherboard by pushing gently back and pulling up from backside towards butt.



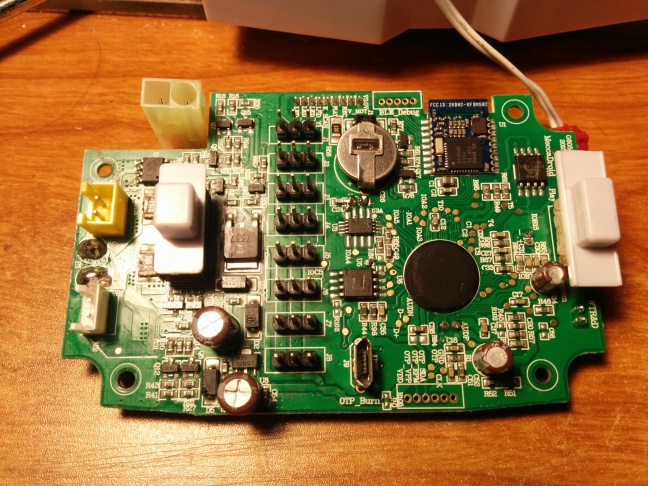
Li-Po battery should be exposed now as well as USB/Language selector/ (on/off) switch board. Remove the two wide head screws and scanned board for usual bad solder joint.




Oh guess what ?- found some. Huge surprise. Was actually expecting a messed up USB mini port but it was OK. Didn’t like its shield solder job. Re-soldered to flow. Fairly impressed didn’t break off yet. Usually what kills port and pulls traces from board. Not just this bot. I like the mini-USB better than micro for its’ toughness. Don’t mean diddly if not soldered properly on either or any. I did have an incident where the battery actually discharged below safety circuit on battery cut-off. Around 2.8 to 3.1 volts. Hasn’t happened again since fixed solder joint. LiPo tested good if were waiting to read that.
Since going this far was a short trip to investigate rest.












There’s enough room to stick a higher mAh battery in there but may require some cutting. Mid classic through hole metal can crystal juts down a bit. 
I would probably go back-pack if I were to add more battery power to it. Platform a little small for my taste for Hack-ability but viable. Is amusing fun toy and probably will leave it as such. For now.
Beating down some of the Sales Hype or ‘Spin’:
I don’t see any signs of Artificial Intelligence or Learning ability in this device. Only thing being taught or learned is the user having to speak clearly and annunciate in different inflections and accentuation until unit recognizes pre-programmed command. A few commands not being listed in manual and which it may or may not do regardless how spoken. That is not clever programming. Just poor voice recognition. Zoomer gen 1 and 2 do have an autonomy mode that is fun to watch. It goes into wander /random action if no command is given after head is pressed down or if a period of time after last command. It will stop on it’s own after battery power reaches low level and it appears to go to sleep. 15 to 20 minutes in average.
Nothing replaces the real thing …yet. There’s no love or longing. It’s a machine and not Intelligent. Maybe in Zoomer gen 99. Only intelligence it has is by programmed and designed illusion. It doesn’t forget tricks. It doesn’t pee or poo or whine and whimper til you play with it or recognize it in some way. Doesn’t have messy food habits but it does need to be fed electricity. It doesn’t slobber or have bad doggy breath. It doesn’t have a favorite treat and get all pissy if you don’t have any. It doesn’t try to guilt trip you into giving up your cheeseburger. It doesn’t chew your slippers or poo in your shoes if it’s upset with you. Can’t really walk it but it will follow you for a short length. Definitely can’t drag you half mile when it sees a squirrel or rabbit. It will listen to your commands and maybe do what wanted. At least that part is realistic. It wont shed on everything once or twice or continuously. It doesn’t jump on your bed, fart, give you a dumb look and leave. Don’t have to take it to Vet but may need a service tech. It doesn’t get sick or die. If LiPo cell goes dead it is not exactly easy for non tech to replace so trash can funeral for some. These things it doesn’t do are part of pet guardianship/ownership. There’s more but point being it shouldn’t be marketed as “your real best friend”. Sometimes friends are assholes. Pet friends too. This bot isn’t smart enough to be a friend or that other thing.
It is cute and fun and will do some cool things. Good amusement for a while. LiPo rechargeable is nice and money saving. Lack of even a cheap wall wart charger sad. Worth the price tag?. $200 plus range no. 100$ range seems high but there is significant tech and many parts assembly so about right. Then again I’m a cheap guy and $100 for a kids toy that may end up in corner within a few weeks is bothersome. That is assuming assembly holds together or wasn’t poorly constructed and child feels like they broke it when having done nothing wrong or haven’t been abusive; then ain’t worth rotted wooden nickel dipped in radioactive sludge. Just saying.
I can go on and will.
Laters.
OVERVIEW:
Tech notes.
Zoomer Pup: Shadow and Bentley, and second generation Zoomer.
Manufacturer : Spin Master
Intended Use is Toy.
Works best on flat surface open space. Linoleum, concrete, wood or other. It does travel on short pile rug but not well and many of its motion / actuation are hampered. Battery consumption is also higher on rug.
Rubber banded Wheels tend to pickup and hold dirt and grime in a short run. Is essential to keep clean for proper operation.
This is a Microprocessor MCU controlled toy. Black Blob style. No I did not attempt reprogram. MCU is from a company (GP) and product I’m not familiar with and have no tool chain for. Nor did I find one openly (free or cheap or common) available at the time. Appears to be OTP but didn’t investigate. Spin Master toys tend to use these MCU line including Meccabrain tm on Meccanoid. Does have a 8Mbit Flash memory that could be reprogrammed. There is a second black blob MCU in head controlling matrixed eyes. .
Height ~8.5 in. Length 12 in. Width 8in. (20.3cm x 30.5cm x 20.3cm) approximations.
Weight: 19.2 oz (548g)
Primary construction material is molded plastic. exo frame
Power Source: 3.7VDC Lithium Polymer (LiPo) 20C 350mAH (21mmx24mm x8mm thickness)
2.860V safety charging cut-off
Cost new: 80-120$ US. as of 8/08/2017-2019. Prices can still go as high as >200$.
****Knock -offs with RF remote control are being sold under ‘Happ Cow’ and other name for about half the price. No voice control. No dual 5×7 Led array eyes. White and Pink Dalmation spotting . One of the fakes has 5×7 arrray eyes but RF remote without voice command. Some have smart device App control.*****
Product web site: http://www.zoomerpup.com or http://www.spinmaster.com.
Next gen of Zoomer with different color schemes, plastic ears, and tail. Next generation has more storage memory and can recognize twice the commands or more. Mechanical operation appears to be identical to first /second generation.
Care and cleaning: DEVICE is in NO WAY WATERPROOF nor so much as water resistant. NOT a BATH or SHOWER or POOL toy. Mildly damp soapy cloth and wipe clean /dry only. Manufacturer says dry cloth only but if ever tried to clean a child’s loved toy that would be seemingly impossible. NOT for use in Dishwasher. Not for use in Microwave Oven. Not a DOT approved speed bump. Not for use as Medical or life saving equipment. Depending on your HMO/PPO/ Healthplan and only with approval which may change or be denied at any moment including during or after surgery /procedure especially if results in death or injury contributed to or by Administration or incompetence thereof, there to , implied or implicit. Agreed third party wanker or …Wait… What was i doing?… oh ya…
Robotic Interactive mobile toy in resemblance to a dog. Kitty cat also available similarly constructed without matrix eyes. Dino and chimp variations too.
Zoomer is modeled after a Dalmation. Zoomer generation 2 has black Heart on chest above charge port and his ears are spotted black not solid black on outside. Black heart on top of butt. I’ve yet to see one with blacked out underside of head as pictured on new box.
Bentley is modeled after a beagle.
Shadow is modeled after a German shepherd.
Or so I’ve read. I get Bentley like beagle and Zoomer like Dalmation. Shadow looks more Malamute than shepherd. MY opinion.
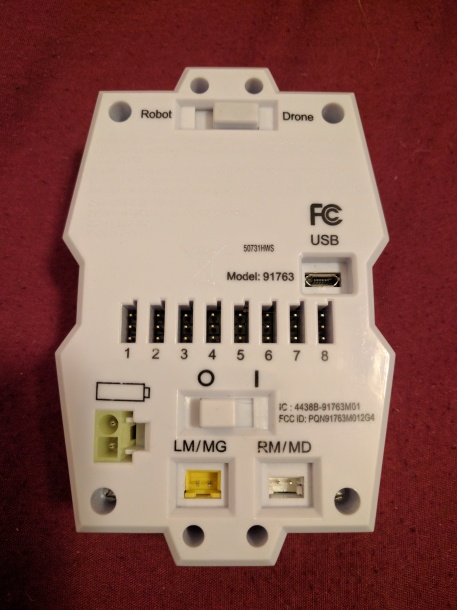
Operation fairly straight forward. Charge battery by plugging in USB mini connector to chest located port and USB A side of cable to a POWERED USB A port. RED light turns on when connected and charging.
There is an anomaly that has to do with the charging circuit and related procedures.
Manual for Shadow states:
3. Make sure Shadow is in the OFF ( O ) position.
4. Insert the mini USB end into the charge port on the
underside of Shadow.
Original Zoomer (First Gen) required the unit to be turned on for charging or the charging light will not turn on.
However if Zoomer gen 1 battery is deeply discharged then it may not charge. That is the charging light doesn’t come on. Leaving Zoomer off and plugging in USB mini port in will still charge but much lower rate and without indicator. Manufacturer recommends leaving Zoomer 1 plugged in for an hour in off position. Zoomer may come back to normal charging after this procedure.
Procedure has no effect on Generation 2 Shadow. There may be other revisions that it will work on.
If LiPo battery is allowed to deep discharge below 2.8-3.1 VDC the internal protection circuit on LiPo battery will keep the battery disconnected and may not allow normal charging. This is also indicative of a dead cell or defective charging circuit or both. The way to fix is to remove battery and replace, recharge battery by another method which requires bypassing safety (BAD tech for shame.) Send unit back to place of purchase if new or within exchange period if able. Contact Spin Master for RMA if any warranty left.
Best is to charge unit when it shows sign of slowing down or it goes to sleep mode and fails to respond. If you see a weird sparkling activity in its LED eyes then that’s an almost too late signal. Get on charger NOW>.
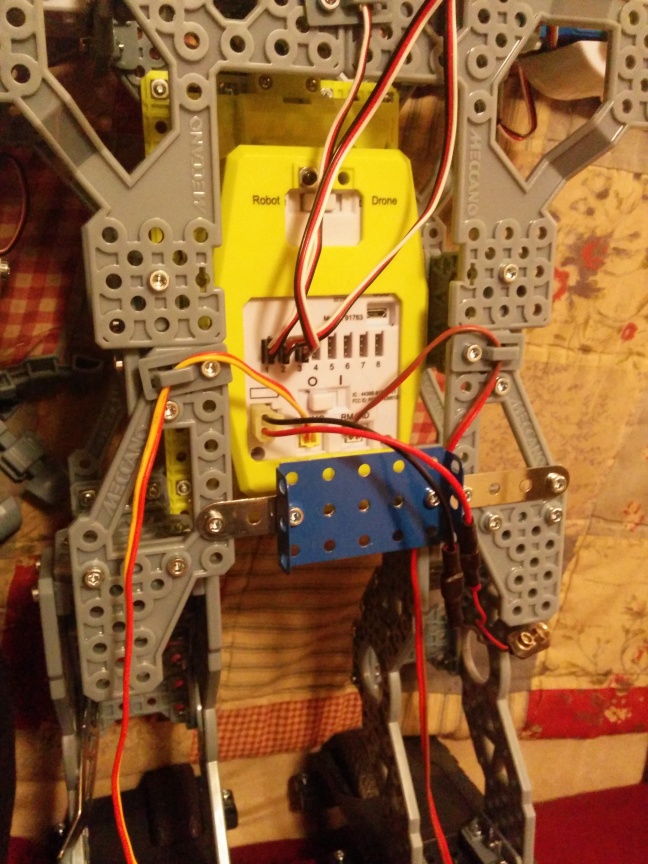
Wait until red charging light goes out (turns off). Check language switch for proper position. “A” position for English. If you don’t plan on using speech recognition then don’t. Turn power switch on. It’s located next to USB mini chest port. That’s towards the “I” character for on and not towards the “O” character. The “O” symbol is for off.
snickering. Silly. I’ve played phone tech before but now I’m pretending NOT to be an expert on the internet.
It’s eyes will go straight lit line as if eyes closed. Place robo dog on floor standing upright or not. Push down on head as if it’s nodding yes. Stand back and watch. It has an autonomous mode. Sort of. If you think a relatively blind, deaf Sheltie dog hyped on caffeine and sugar snacks and bouncing off walls is somehow autonomous then there it is. Unlike a Sheltie which even in chemically induced hyper-state will eventually feel pain; robot dog will keep bouncing. Up to approximately 20-30 minutes on fresh charge. Fortunately no damage to kitchen cabinetry so I can continue to breathe free from the Wrath of Kitchen Lordess or Troll. Sure it’s all cute bouncing off walls but rub new cabinetry the wrong way and wolverine swinging badger bloodfest carnage may ensue.
Power Source
Power source is Lithium Polymer (LiPo) 3.7 V Single cell. Recharged from USB mini to USB A cable provided.
The unit does NOT come with it’s own charger. Can be plugged into personal computer USB A ports.
I suggest using a typical 5VDC @1Amp USB A wall wart cellphone charger. Normally device recharges in about an hour.
This can vary with current (Amps) output of USB A port.
***Keep in mind that some laptops will go into low power sleep/standby mode thereby cutting current on USB ports or greatly reducing power during battery operation. True for some desktop PC motherboards. Results in not recharging or incredibly slow charging otherwise. Check your power settings in Operating System.
Interaction/Sensory Input:
Specific Voice command recognition through microphone. List of commands further down. More precisely multiple speech segment recognition.
The difference between words is not based on the entirety of each word but on multiple segments of each word. For Instance command “Vegas Baby” would be just as easily recognized by the unit as saying “egg as bray bee” and other variations. Trying “slots baby ” does work.
English, Spanish or French speech recognition manually switchable by three position switch located in compartment on front lower chest next to power switch and charging port under removable tethered rubber cover. Language Switch must be positioned correctly for intended native language of user or recognition will be unlikely. Recognizes loud noises as well.
Two channel reflected IR detection located on chest. Short distance left-right differentiation detection.
Head pitch down switch. Used for entering command modes. Once for standard voice command set or hold down for approximately three seconds for ‘secret’ extended command set.
Switch on top of hip for entering trick mode. Trick mode is essentially random selection from voice commands.
Five interior potentiometers for position of legs and roll rotation or hip. Presently program does not include direct interaction from movement of legs.Which would have been nice for the “shake a paw” command. Maybe in third generation? Legs can be moved and are spring loaded to return position without damage but only in their intended axial movement. Reasonably designed breakage resistance.
**No attempt should be made to force hip to move. Mechanism does have snap over torque relief on driven gear but continued rotation will result in damage to geartrain eventually. Holding hip from moving when in operation will force the driven gear to ‘snap’ over without significant damage but will eventually wear to unusable.
A tilt switch is located internally on chest daughter board for determining Zoomer Shadow’ s orientation. Zoomer is capable of self righting from several most non upright standing position..
Given inputs and responses to input with plenty of observation it is misleading to say that ‘Zoomer series learns anything. It is incapable of being taught. It has a command set. It can only recognize that command set. There are built in behaviors which exhibit themselves somewhat randomly.
Output / Manipulators:
Speaker: Makes various sound effects from dog panting, barking, growling, and other sound effects.
Eyes: Two 5×7 LED matrix simulate eye movement and expression. Used for other display purpose too including character display.
Five DC brush PM motors control all of Zoomer’s movement. One large low geared motor controls hip roll. Four much smaller motors, one in each foot, control wheel rotation for locomotion and through clever manipulation also control position of legs and lateral yaw of hip . Wheel motors use a friction/speed spring tension slip gear set. Two transmissions each leg. One in wheel itself and other in leg powered by same motor. The head moves in relation to hip by means of lever and spring. Dual TI 8835 dual H-bridge power leg motors. Hip motor has its’ own discrete component H-bridge. It can go to about 1m/s. Not actually measured speed.
Voice Commands
Push down on head to give it a voice command. Continue pushing for at least 3 seconds to enter extended (“secret”) command. There is a voice command to enter “secret” voice command mode.
Present list of voice commands-Command Action
Be sneaky Bend all legs and creep around quietly.
Beg Sit and lift front two legs not really goes back and forward lifting front legs
Chase your tail Go around in a circle 3 times
Come here Fold his legs and move towards the first thing he sees.
Follow me *You Stand in front of Shadow then slowly walk forward.
shadow Barks twice. Follow your feet.
Free Run in a circle and bark happily.
Go pee pee Lift his leg and do a back leg shuffle.
Go to sleep Yawn, turn around in a circle then lay down or
turn over and sleep on side
I love you Bark ‘I love you’
Lay down Fold all legs completely.
lets dance break dancing puppy
Let’s go for a walk Bark. Wag his tail and run around with excitement
Let’s play *You Hold a ball or object in front of Shadow, and slowly move it forward and back.
Shadow Lunges at the object, nudge it forward, back up, then repeat.
Look at me *You Hold your hand in front of his chest and move it left to right.
Shadow Follows your hand with his eyes.
Play dead Roll on to his back and an X appears in his eyes.
Protect me Growl, bark. Lunge forward with front legs down, back legs up.
And bark at any motion.
Say hello Bark hello in a dog voice
Shake a paw *You Move your hand toward one of his font paws and
Shadow will Twist his torso and move one paw toward you
Shake off Shake like a wet dog spin cycle
sing me a song sings a song clementine or
Sit down Fold back legs and keep front legs straight
Speak Bend back legs with each bark.
Stand up Stand up
Stand guard Bark angrily when seeing something.
Stay Sit still until given the voice command, “Free“.
Extended (secret trick mode) –
hold Shadow’s head down for
3 seconds until he displays upside down question marks
or voice command:
‘Show me your secret tricks.” – shadow howls twice and then pant. His eyes will
turn into upside down question marks to indicate that
he is in “secret trick mode”.
Command Action
Back it up Dance, lifting his rear up and down.
brick breaker brick game using chest sensors to move paddle left and right
cluck like a chicken clucks like chicken
Count me down Show numbers in his eyes, and bark like crazy when his eyes get to zero
door bell makes noise like door bell and runs around
who’s your favorite you in dog sound and heart in eyes
fire fire truck siren with flames in eyes
fish single dot
Go Fish Show a fish swimming across his eyes.
I’m Home runs in circle
Let it rip let out a high pitched fart.
Moo like a cow Imitate the sound of a cow.
Show me the money Show dollar symbols in his eyes.
table tennis Table tennis in eyes – have to use your hand on his chest sensors ping pong may also work
Vegas baby or casino baby eyes roll like slot machine and slot machine sound
zombie time slow moving with groan
.There are more. These listed here are verified though device may refuse to recognize any command. Tone, Inflection or accent in speech of user also effects recognition. Try saying commands in different speed and syllable accentuation. By pressing trick button on top of butt you can compare random tricks to ones listed to see if any are missing. I know at least one is.











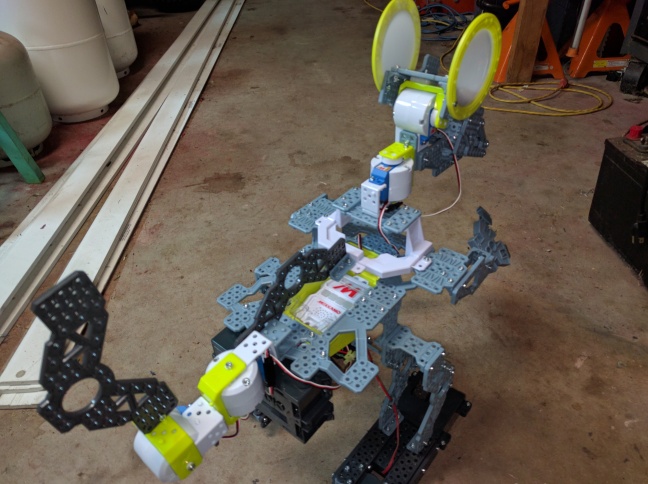
 Wizard of Oz G15 voice. Anyway… alternative build.
Wizard of Oz G15 voice. Anyway… alternative build.








 April -01 2017
April -01 2017